#include <small_matrix.hpp>
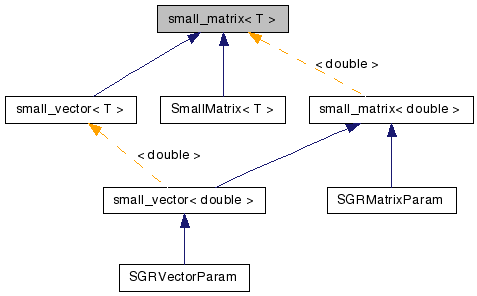
Inheritance diagram for small_matrix< T >:
Public Member Functions | |
| small_matrix () | |
| Empty constructor. | |
| void | init (int the_m, int the_n, T *the_entries) |
| Initializes the fields of the structure. | |
| small_matrix (int the_m, int the_n, T *the_entries) | |
| Creates a small matrix of a given size. | |
| small_matrix (int the_m, int the_n, T &first_entry) | |
| Creates a small matrix of a given size. | |
| small_matrix (int the_m, T *the_entries) | |
| Creates a small VECTOR (NOT a square matrix). | |
| small_matrix (int the_m, T &first_entry) | |
| Creates a small VECTOR (NOT a square matrix). | |
| int | n_rows () const |
| Returns the number of the rows. | |
| int | n_cols () const |
| Returns the number of the columns. | |
| T * | entries () |
| Pointer to the array of the entries. | |
| const T * | entries () const |
| Const-pointer to the array of the entries. | |
| bool | has_size (int the_m, int the_n=1) const |
| Checks the matrix size. | |
| bool | has_same_size_as (const small_matrix< T > &A) const |
| Checks whether 'this' matrix has the same size as A. | |
| bool | is_mul_compatible_with (const small_matrix< T > &A) const |
| Non-zero if 'this * A' is well-defined. | |
| void | print_maple (std::ostream &s) const |
| Prints the matrix in the Maple form. | |
| void | print_matlab (std::ostream &s) const |
| Prints in the Matlab form. | |
| const T & | operator() (int i, int j) const |
| Const indexation of the matrix entries. | |
| T & | operator() (int i, int j) |
| Indexation of the matrix entries. | |
| const T & | operator() (int i) const |
| Const indexation operator for vectors. | |
| T & | operator() (int i) |
| Indexation operator for vectors. | |
| small_matrix< T > & | operator= (const small_matrix< T > &from) |
| Assignment operator. | |
| small_matrix< T > & | operator= (const T *seg) |
| Copying the entries from a memory segment. | |
| small_matrix< T > & | zero () |
| Set all the entries to zero. | |
| small_matrix< T > & | diag (T a) |
Number-to-matrix assignment:  . . | |
| double | norm2 () const |
| The vector Eucleadean norm. | |
| double | max_norm () const |
| The maximum vector norm. | |
| double | norm1 () const |
| The Frobenius norm. | |
| T | trace () const |
Returns the trace of a SQUARE matrix:  . . | |
| T | compute_det () |
Computes the determinant of 'this' matrix:  . . | |
| T | operator & (small_matrix< T > &vec) const |
Scalar product (the sum of the products) . . | |
| small_matrix< T > & | operator *= (T scalar) |
Multiply 'this' matrix by a scalar  . . | |
| small_matrix< T > & | operator/= (T scalar) |
Divide 'this' matrix by a scalar:  . . | |
| small_matrix< T > & | product (T scalar, const small_matrix< T > &A) |
| Multiply a matrix by a scalar and save the result in 'this' matrix: . | |
| small_matrix< T > & | product (const small_matrix< T > &A, T scalar) |
Multiply a matrix by a scalar and save the result in 'this' matrix:  . . | |
| small_matrix< T > & | add_mul (T scalar, const small_matrix< T > &A) |
Multiply a matrix by a scalar and add the result to 'this':  . . | |
| small_matrix< T > & | add_mul (const small_matrix< T > &A, T scalar) |
| Multiply a matrix by a scalar and add the result to 'this': . | |
| small_matrix< T > & | sum (const small_matrix< T > &A, const small_matrix< T > &B) |
Add two matrices and save the result in 'this' one:  . . | |
| small_matrix< T > & | operator+= (const small_matrix< T > &A) |
Add matrix to 'this' one:  . . | |
| small_matrix< T > & | difference (const small_matrix< T > &A, const small_matrix< T > &B) |
Subtract one matrix from another and save the result in 'this' one:  . . | |
| small_matrix< T > & | operator-= (const small_matrix< T > &A) |
Subtract matrix from'this' one:  . . | |
| small_matrix< T > & | product (const small_matrix< T > &A, const small_matrix< T > &B) |
Multiply two matrices and save the result in 'this' one:  . . | |
| small_matrix< T > & | add_mul (const small_matrix< T > &A, const small_matrix< T > &B) |
Multiply two matrices and save the result in 'this' one:  . . | |
| small_matrix< T > & | sub_mul (small_matrix< T > &A, small_matrix< T > &B) |
Operation  . . | |
| small_matrix< T > & | add_a_mul (T a, small_matrix< T > &A, small_matrix< T > &B) |
Operation  . . | |
| small_matrix< T > & | transposed (small_matrix< T > &A) |
Transpose a given matrix and save the result to 'this' one:  . . | |
| small_matrix< T > & | transposed () |
Transposes 'this' matrix:  . . | |
| small_matrix< T > & | conjugate (small_matrix< T > &A) |
Compute the conjugate of a given matrix and save the result to 'this' one:  . . | |
| small_matrix< T > & | conjugate () |
| Computes a conjugate of 'this' matrix, returns the reference to it: . | |
| small_matrix< T > & | invmul_Gauss (small_matrix< T > &M1) |
Operation:  . . | |
| void | LU_decomp (small_matrix< T > *inv_L=0) |
Computes the complete LU-decomposition of a matrix, i. e. : . . | |
| small_matrix< T > & | mul_by_Givens (small_matrix< T > &M1) |
| Multiply 'this' matrix (M2) by the Givens rotation transforming a given matrix (M1) to an upper triangular form. | |
| small_matrix< T > & | invmul_Givens (small_matrix< T > &M1) |
Multiplyes 'this' (M2) matrix by  , thus computes the product , thus computes the product  . . | |
| void | QR_Givens (small_matrix< T > &M) |
| Computes the QR-decomposition by the Givens rotations. | |
| template<> | |
| float | conj (float x) |
| template<> | |
| double | abs (float x) |
| template<> | |
| double | sc_square (float x) |
| template<> | |
| bool | is_num_zero (float x) |
Static Public Member Functions | |
| static T | conj (T x) |
| static double | abs (T x) |
| static bool | is_num_zero (T x) |
| static double | sc_square (T x) |
Protected Attributes | |
| int | m |
| int | n |
| T * | entry |
No implicit dynamic memory allocation.
| small_matrix< T >::small_matrix | ( | ) | [inline] |
Empty constructor.
We allow dummy objects.
| small_matrix< T >::small_matrix | ( | int | the_m, | |
| int | the_n, | |||
| T * | the_entries | |||
| ) | [inline] |
Creates a small matrix of a given size.
| [in] | the_m | The horizontal size of the matrix. |
| [in] | the_n | The vertical size of the matrix. |
| [in] | the_entries | Array of entries. |
| small_matrix< T >::small_matrix | ( | int | the_m, | |
| int | the_n, | |||
| T & | first_entry | |||
| ) | [inline] |
Creates a small matrix of a given size.
The same but with "T &" instead of "T *"
| [in] | the_m | The horizontal size of the matrix. |
| [in] | the_n | The vertical size of the matrix. |
| [in] | first_entry | Reference of the first entry. |
| small_matrix< T >::small_matrix | ( | int | the_m, | |
| T * | the_entries | |||
| ) | [inline] |
Creates a small VECTOR (NOT a square matrix).
| [in] | the_m | The size. |
| [in] | the_entries | The array of entries. |
| small_matrix< T >::small_matrix | ( | int | the_m, | |
| T & | first_entry | |||
| ) | [inline] |
Creates a small VECTOR (NOT a square matrix).
The same but with "T &" instead of "T *"
| [in] | the_m | the size |
| [in] | first_entry | reference of the first entry |
| static T small_matrix< T >::conj | ( | T | x | ) | [static] |
the conjugate of x
| static double small_matrix< T >::abs | ( | T | x | ) | [static] |
the absolute value of x
| static bool small_matrix< T >::is_num_zero | ( | T | x | ) | [static] |
true if x is numerically zero
| static double small_matrix< T >::sc_square | ( | T | x | ) | [static] |
returns x * conj (x)
| void small_matrix< T >::init | ( | int | the_m, | |
| int | the_n, | |||
| T * | the_entries | |||
| ) | [inline] |
Initializes the fields of the structure.
| [in] | the_m | The horizontal size of the matrix. |
| [in] | the_n | The vertical size of the matrix. |
| [in] | the_entries | Array of entries. |
| int small_matrix< T >::n_rows | ( | ) | const [inline] |
Returns the number of the rows.
| int small_matrix< T >::n_cols | ( | ) | const [inline] |
Returns the number of the columns.
| T* small_matrix< T >::entries | ( | ) | [inline] |
Pointer to the array of the entries.
| const T* small_matrix< T >::entries | ( | ) | const [inline] |
Const-pointer to the array of the entries.
| bool small_matrix< T >::has_size | ( | int | the_m, | |
| int | the_n = 1 | |||
| ) | const [inline] |
Checks the matrix size.
| [in] | the_m | The true size. |
| [in] | the_n | The true size. |
| bool small_matrix< T >::has_same_size_as | ( | const small_matrix< T > & | A | ) | const [inline] |
Checks whether 'this' matrix has the same size as A.
| bool small_matrix< T >::is_mul_compatible_with | ( | const small_matrix< T > & | A | ) | const [inline] |
Non-zero if 'this * A' is well-defined.
| void small_matrix< T >::print_maple | ( | std::ostream & | s | ) | const |
Prints the matrix in the Maple form.
Reimplemented in small_vector< T >, and small_vector< double >.
| void small_matrix< T >::print_matlab | ( | std::ostream & | s | ) | const |
Prints in the Matlab form.
| const T& small_matrix< T >::operator() | ( | int | i, | |
| int | j | |||
| ) | const [inline] |
Const indexation of the matrix entries.
This operation allows to index the matrix entries starting from (0, 0). Example: M (1, 0) means the first entry in the second line.
| [in] | i | Row-index of the element. |
| [in] | j | Column-index of the element. |
| T& small_matrix< T >::operator() | ( | int | i, | |
| int | j | |||
| ) | [inline] |
Indexation of the matrix entries.
This operation allows to index the matrix entries starting from (0, 0). Example: M (1, 0) means the first entry in the second line.
| [in] | i | Row-index of the element. |
| [in] | j | Column-index of the element. |
| const T& small_matrix< T >::operator() | ( | int | i | ) | const [inline] |
Const indexation operator for vectors.
E. g. vec (3) means the third 4th component of 'vec'.
| [in] | i | Index of the element. |
| T& small_matrix< T >::operator() | ( | int | i | ) | [inline] |
Indexation operator for vectors.
E. g. vec (3) means the third 4th component of 'vec'.
| [in] | i | Index of the element. |
| small_matrix< T > & small_matrix< T >::operator= | ( | const small_matrix< T > & | from | ) | [inline] |
Assignment operator.
Merely copies the entries of the source matrix to the entries of the destination matrix. The matrices should have the same size.
| [in] | from | Source matrix. |
| small_matrix<T>& small_matrix< T >::operator= | ( | const T * | seg | ) | [inline] |
Copying the entries from a memory segment.
Merely copies n * m values starting from a given pointer to the entry array.
| small_matrix<T>& small_matrix< T >::zero | ( | ) | [inline] |
Set all the entries to zero.
| small_matrix< T > & small_matrix< T >::diag | ( | T | a | ) | [inline] |
Number-to-matrix assignment: .
Sets the matrix to a I for a given scalar a. The matrix should be square.
| double small_matrix< T >::norm2 | ( | ) | const [inline] |
The vector Eucleadean norm.
| double small_matrix< T >::max_norm | ( | ) | const [inline] |
The maximum vector norm.
| double small_matrix< T >::norm1 | ( | ) | const [inline] |
The Frobenius norm.
| T small_matrix< T >::trace | ( | ) | const [inline] |
Returns the trace of a SQUARE matrix: .
The matrix should be square.
| T small_matrix< T >::compute_det | ( | ) | [inline] |
Computes the determinant of 'this' matrix: .
The function returns the value of the determinant. The 'this' matrix must be square. During the computation, 'this' matrix is DESTROYED.
| T small_matrix< T >::operator & | ( | small_matrix< T > & | vec | ) | const [inline] |
Scalar product (the sum of the products).
| [in] | vec | The second argument of the product. |
| small_matrix<T>& small_matrix< T >::operator *= | ( | T | scalar | ) | [inline] |
Multiply 'this' matrix by a scalar .
| small_matrix<T>& small_matrix< T >::operator/= | ( | T | scalar | ) | [inline] |
Divide 'this' matrix by a scalar: .
| small_matrix<T>& small_matrix< T >::product | ( | T | scalar, | |
| const small_matrix< T > & | A | |||
| ) | [inline] |
Multiply a matrix by a scalar and save the result in 'this' matrix: .
The size of a source matrix should correspond to the size of 'this' matrix.
| [in] | scalar | The scalar by which the matrix shall be multiplied. |
| [in,out] | A | The matrix that shall be multiplied. |
| small_matrix<T>& small_matrix< T >::product | ( | const small_matrix< T > & | A, | |
| T | scalar | |||
| ) | [inline] |
Multiply a matrix by a scalar and save the result in 'this' matrix: .
The size of a source matrix should correspond to the size of 'this' matrix.
| [in] | scalar | The scalar by which the matrix shall be multiplied. |
| [in,out] | A | The matrix that shall be multiplied. |
| small_matrix<T>& small_matrix< T >::add_mul | ( | T | scalar, | |
| const small_matrix< T > & | A | |||
| ) | [inline] |
Multiply a matrix by a scalar and add the result to 'this': .
The size of a source matrix should correspond to the size of 'this' matrix.
| [in] | scalar | The scalar by which the matrix shall be multiplied. |
| [in,out] | A | The matrix that shall be multiplied. |
| small_matrix<T>& small_matrix< T >::add_mul | ( | const small_matrix< T > & | A, | |
| T | scalar | |||
| ) | [inline] |
Multiply a matrix by a scalar and add the result to 'this': .
The size of a source matrix should correspond to the size of 'this' matrix.
| [in] | scalar | The scalar by which the matrix shall be multiplied. |
| [in,out] | A | The matrix that shall be multiplied. |
| small_matrix< T > & small_matrix< T >::sum | ( | const small_matrix< T > & | A, | |
| const small_matrix< T > & | B | |||
| ) | [inline] |
Add two matrices and save the result in 'this' one: .
All the matrices should have equal sizes. The matrices may not be different. The function returns the reference to 'this' object.
| [in] | A | Left-hand side |
| [in] | B | Right-hand side |
| small_matrix<T>& small_matrix< T >::operator+= | ( | const small_matrix< T > & | A | ) | [inline] |
Add matrix to 'this' one: .
All the matrices should have equal sizes. The matrices may not be different.
| [in] | A | Right-hand side |
| small_matrix< T > & small_matrix< T >::difference | ( | const small_matrix< T > & | A, | |
| const small_matrix< T > & | B | |||
| ) | [inline] |
Subtract one matrix from another and save the result in 'this' one: .
All the matrices should have equal sizes. The matrices may not be different.
| [in] | A | Left-hand side |
| [in] | B | Right-hand side |
| small_matrix<T>& small_matrix< T >::operator-= | ( | const small_matrix< T > & | A | ) | [inline] |
Subtract matrix from'this' one: .
All the matrices should have equal sizes. The matrices may not be different.
| [in] | A | Right-hand side |
| small_matrix< T > & small_matrix< T >::product | ( | const small_matrix< T > & | A, | |
| const small_matrix< T > & | B | |||
| ) | [inline] |
Multiply two matrices and save the result in 'this' one: .
The sizes of the matrices should be 'consistent'. The arguments may coincide, but should not coinside with 'this' matrix.
| [in] | A | Left-hand side |
| [in] | B | Right-hand side |
| small_matrix< T > & small_matrix< T >::add_mul | ( | const small_matrix< T > & | A, | |
| const small_matrix< T > & | B | |||
| ) | [inline] |
Multiply two matrices and save the result in 'this' one: .
The sizes of the matrices should be 'consistent'. The arguments may coincide, but should not coinside with 'this' matrix.
| [in] | A | Left-hand side |
| [in] | B | Right-hand side |
| small_matrix< T > & small_matrix< T >::sub_mul | ( | small_matrix< T > & | A, | |
| small_matrix< T > & | B | |||
| ) | [inline] |
Operation .
The matrices should have the consistent sizes. A and B may coincide, but may not coincide with *this. The function returns the reference to 'this'.
| small_matrix< T > & small_matrix< T >::add_a_mul | ( | T | a, | |
| small_matrix< T > & | A, | |||
| small_matrix< T > & | B | |||
| ) | [inline] |
Operation .
The matrices should have the consistent sizes. A and B may coincide, but may not coincide with *this. The function returns the reference to 'this'.
| small_matrix< T > & small_matrix< T >::transposed | ( | small_matrix< T > & | A | ) | [inline] |
Transpose a given matrix and save the result to 'this' one: .
The matrices should have the corresponding sizes. That may be a reference to the same matrix which should be square. But transposed () is a bit more efficient in this case. A reference to 'this' matrix is returned.
| small_matrix< T > & small_matrix< T >::transposed | ( | ) | [inline] |
Transposes 'this' matrix: .
The matrix must be square.
| small_matrix< T > & small_matrix< T >::conjugate | ( | small_matrix< T > & | A | ) | [inline] |
Compute the conjugate of a given matrix and save the result to 'this' one: .
The matrices should have the corresponding sizes. That may be a reference to the same matrix which should be square. But conjugate () is a bit more efficient in this case. A reference to 'this' matrix is returned.
| small_matrix< T > & small_matrix< T >::conjugate | ( | ) | [inline] |
Computes a conjugate of 'this' matrix, returns the reference to it: .
The matrix must be square.
| small_matrix< T > & small_matrix< T >::invmul_Gauss | ( | small_matrix< T > & | M1 | ) | [inline] |
Operation: .
The calculation is done by the Gaussian elimination with pivoting. As the pivote element, the first nonzero element in the current column is taken. If no nonzero pivote elements found (i.e. this is numerically singular), the function throws an exception. The contents of this is always destroyed. The function returns the reference to 'this' matrix.
| void small_matrix< T >::LU_decomp | ( | small_matrix< T > * | inv_L = 0 |
) | [inline] |
Computes the complete LU-decomposition of a matrix, i. e. :.
 is a lower diagonal matrix,
is a lower diagonal matrix,  is an upper diagonal matrix,
is an upper diagonal matrix,  . The function returns in 'this' matrix and
. The function returns in 'this' matrix and  as
as inv_L (unless inv_L == 0). If the complete LU-decomposition does not exist, the function throws an exception.
| small_matrix< T > & small_matrix< T >::mul_by_Givens | ( | small_matrix< T > & | M1 | ) | [inline] |
Multiply 'this' matrix (M2) by the Givens rotation transforming a given matrix (M1) to an upper triangular form.
After the operation M1 contains the upper triangular form. The function returns the reference to 'this' matrix:
| small_matrix< T > & small_matrix< T >::invmul_Givens | ( | small_matrix< T > & | M1 | ) | [inline] |
Multiplyes 'this' (M2) matrix by , thus computes the product .
This is done by the Givens rotations. The result is stored in M2. The contents of M1 is always destroyed. If the matrix M1 is not invertable by the QR decomposition (i. e. it is a singular matrix) then the function throws an exception. The contents of the matrices M1 and M2 is then destroyed.
| void small_matrix< T >::QR_Givens | ( | small_matrix< T > & | M | ) | [inline] |
Computes the QR-decomposition by the Givens rotations.
The matrix to decompose should be in  . The function saves the upper triangular matrix
. The function saves the upper triangular matrix  in whereas the transformation
in whereas the transformation  is saved in 'this'. The 'this' matrix should have the same size as .
is saved in 'this'. The 'this' matrix should have the same size as .
| float small_matrix< float >::conj | ( | float | x | ) | [inline] |
| double small_matrix< float >::abs | ( | float | x | ) | [inline] |
| double small_matrix< float >::sc_square | ( | float | x | ) | [inline] |
| bool small_matrix< float >::is_num_zero | ( | float | x | ) | [inline] |
int small_matrix< T >::m [protected] |
number of the rows
int small_matrix< T >::n [protected] |
number of the columns
T* small_matrix< T >::entry [protected] |
array of the entries
 1.5.2
1.5.2